
Summary of Research Topics
1. Statistical methods for uncertainty quantification in Multi-Fidelity systems (2022-)
Motivation: Naval ship motion application (and especially their extremes)
Goal: Development of theoretically rigorous statistical methodologies
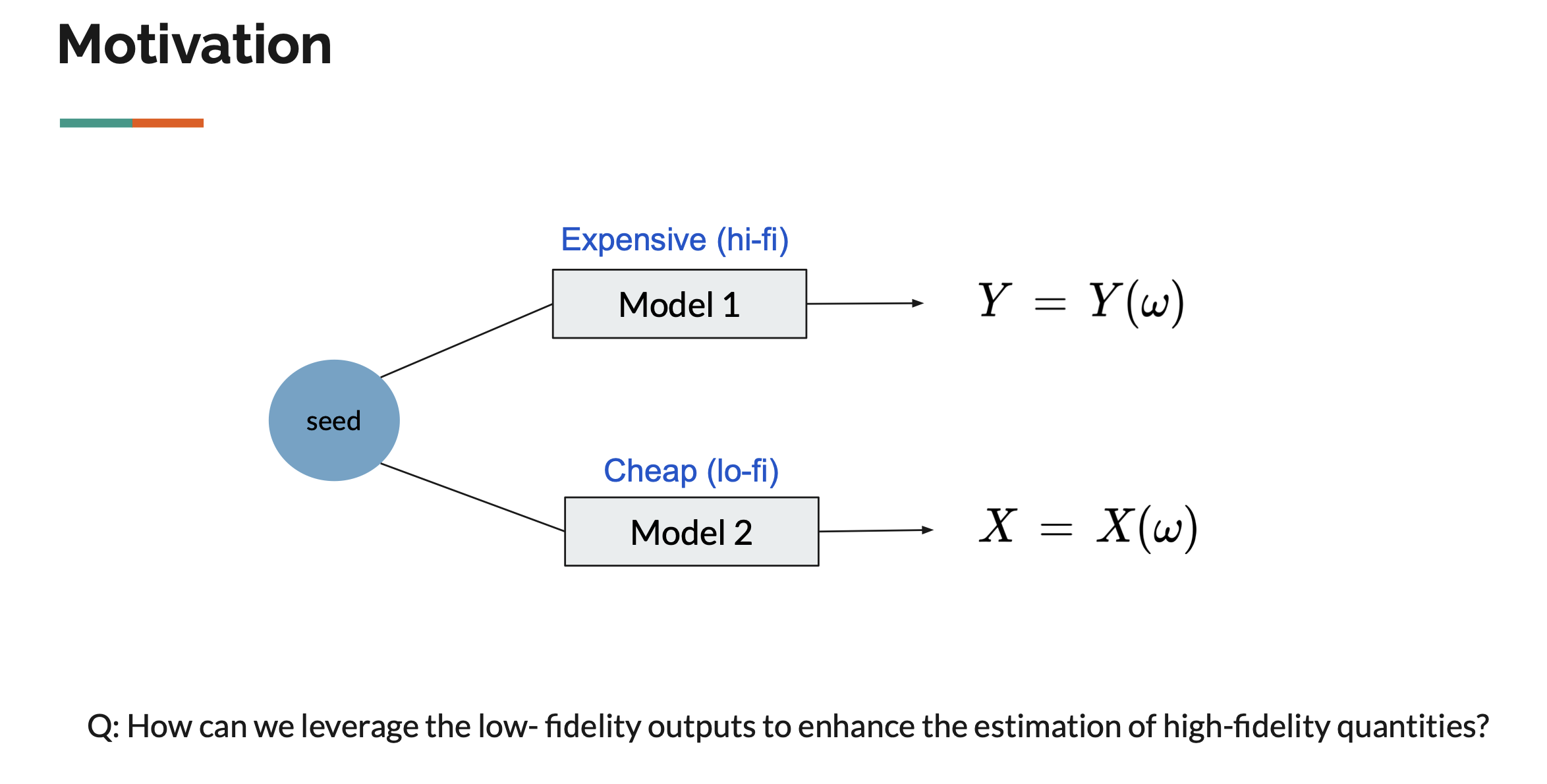
The ultimate goal of this research is to achieve probability density estimation of high-fidelity (expensive) outputs by effectively leveraging (cheap) surrogate model outputs. The research explores methods to address this challenge through:
- Nonparametric kernel density estimation with importance sampling (Kim (2025a)).
- Parametric ensemble estimator approach (Kim (2025b)).
This field includes semi-supervised learning problems, where partially labeled data: \((X_1,Y_1), \dots (X_n,Y_n), X_{n+1}, \dots, X_{n+m},\) are used as low-fidelity data ($X$) is more accessible than high-fidelity data ($Y$). According to Peherstorfer et al. (2018), multi-fidelity (MF) strategies can be categorized as:
- Adaptation: High-fidelity information is used to enhance the lower-fidelity model.
- Kim (2023) of adaptation type focused on improving the low-fidelity output by leveraging high-fidelity output.
- Filtering: The low-fidelity model is explored to determine where to evaluate the high-fidelity model.
- Kim (2025a) tackled the problem of estimating the probability density function (p.d.f) of high-fidelity values based on a kernel-based importance sampling estimator, combining filtering and fusion strategies.
- Fusion: This involves the combined use of multiple models.
- Kim (2025b) proposed an ensemble approach by reformulating the distribution estimation problem into a parameter estimation of parametrized distribution, compared and analyzed the uncertainty reduction of fusion-type multi-fidelity Monte Carlo estimators.
Tools: Simulations conducted using R.
2. Spatio-Temporal Modeling in Latent Space
2-1. Spatio-temporal analisys of particulate matter data (2020–2021)
Motivation: Particulate matter data in Seoul
Goal: Forecasting, missing data imputation, and quantile analysis
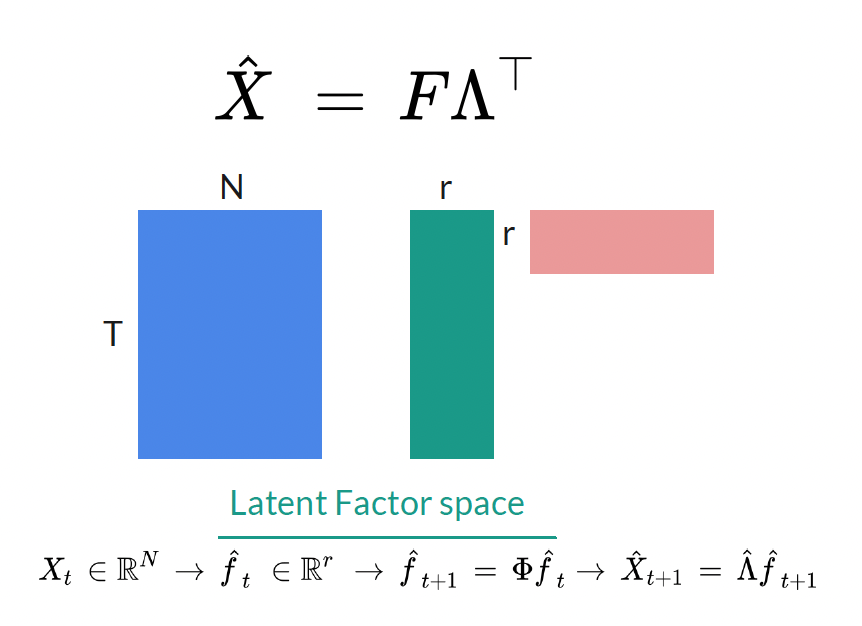
During my master’s studies, I analyzed particulate matter data using a dynamic factor model and the EM algorithm.
Structure:
- Latent state projection via linear projection
- Latent dynamics modeled using time-series vector auto-regressive (VAR) model
Although I achieved the strong performance in prediction (interpolation) and missing data imputation, I recognized a key limitation: models trained solely on data inevitably regressed toward average predictions in extrapolation scenarios. This motivated me to focus on integrating governing physics into data-driven models during my doctoral studies to enhance performance, interpretability, and real-world relevance.
Part of this research was presented at the Conference on Statistical Practice 2021. Poster available here.
2-2. Physics-Informed Neural Networks (2024 -)
Motivation: Solve spatio-temporal parametrized partial differential equations (PDEs).
Goal: Introducing a physics-informed learning objective to the latent state modeling structure
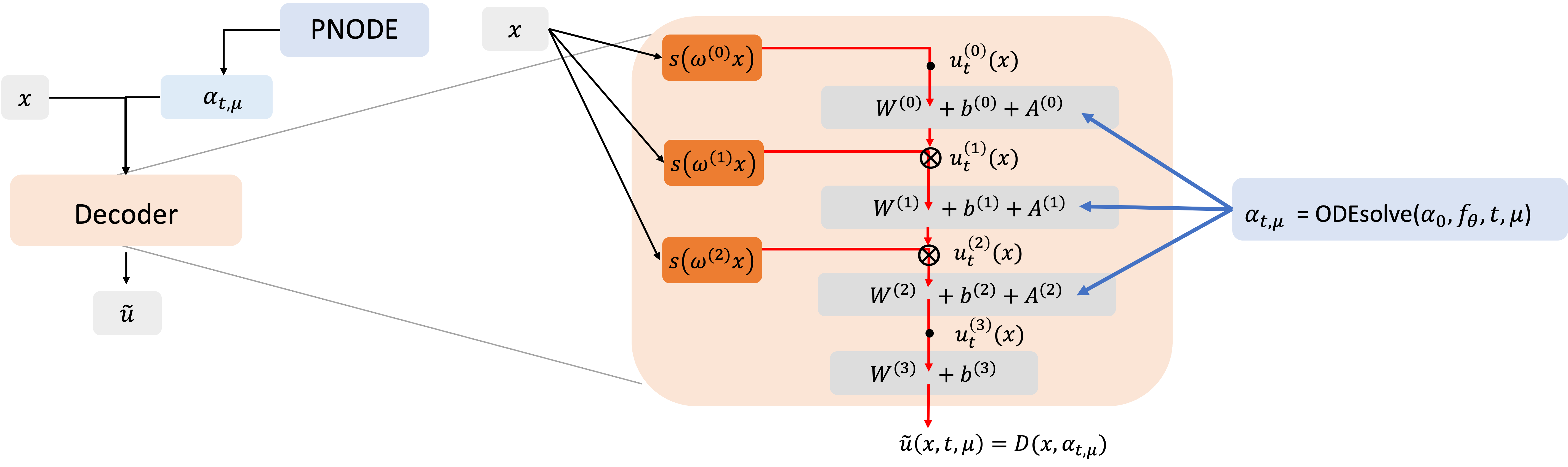
Gaining hands-on experience on data-driven physics simulation during my first year PhD summer internship, I shifted towards using physics-informed neural networks (PINNs). We present CNF-ROM structure (which uses neural networks for latent space modeling) and its physics-informed learning objective.
Structure:
- Latent state projection via decoder-only process using implicit neural representation.
- Latent dynamics modeled using parametric neural ODEs (PNODEs).
This framework expanded from data-driven methodologies to integrate physics-integrated frameworks, addressing the challenges identified in my earlier research and achieving superior performance in interpolation, extrapolation in parameter space as well as forecasting.
Tools: Simulations conducted using PyTorch and Python.
References
1.
- Peherstorfer, B., Willcox, K., and Gunzburger, M, (2018), ‘Survey of multifidelity methods in uncertainty propagation, inference, and optimization’. SIAM Review, 60(3), 550–591.
- M. Kim, V. Pipiras, A. Reed, K. Weems, (2023), Calibration of low-fidelity ship motion programs through regressions of high-fidelity forces, Ocean Engineering, 290, 116321.
- M. Kim, K. O’Connor, V. Pipiras, T. Sapsis, (2025a), Sampling low-fidelity outputs for estimation of high-fidelity density and its tails, SIAM/ASA Journal on Uncertainty Quantification, 13, 30–62.
- M. Kim, B. Brown, V. Pipiras, (2025b), Parametric multi-fidelity Monte Carlo estimation with applications to extremes, Technometrics, accepted.
2-2.
- M. Kim, T. Wen, K. Lee, Y. Choi, (2024), Physics-informed reduced order model with conditional neural fields, NeurIPS 2024 Workshop on Machine Learning and the Physical Sciences.